| ● |
本ページの内容は、上位入賞者の皆さんへアンケートを送り、ご回答いただいた内容を掲載しています。お忙しい中ご回答いただきました顧問の先生、選手の方々のご厚意に感謝申し上げます。 |
| ● |
学校や本人へ直接問い合わせることはしないようお願いします。 |
|
【高校生 上位入賞者】
|
高校生 Advanced Classの部 優勝
 |
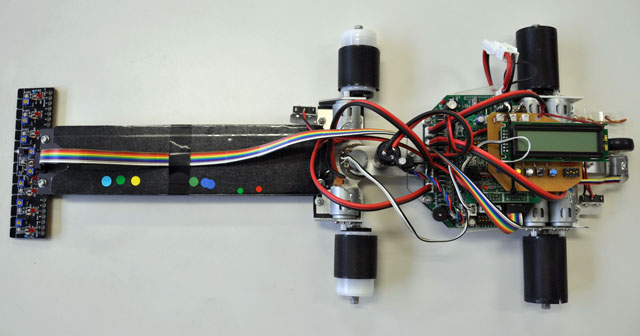
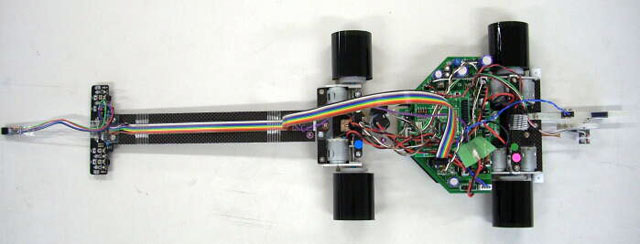
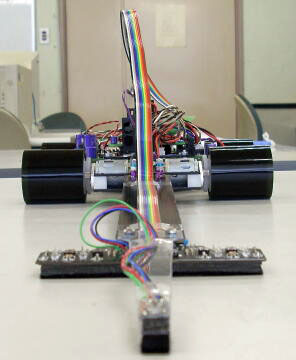
| 熊本県立球磨工業高等学校 土屋 大樹君「GT−X」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:560mm、全幅:250mm、ホイールベース:162mm |
| 重量 |
1010 g(電池含む) |
| 電池 |
Ni-Cd電池8本 |
| 駆動モータ |
前輪2個 後輪4個 ギヤ比 8:50
加えている電圧:9.6V |
| タイヤ、ホイール |
フィルムケースに2mm厚のスポンジを巻き付け、その上にシリコンシートを貼り付けている。
直径:35mm タイヤ幅:前30mm、後55mm |
| サーボ |
マクソン社RE16(118682 + 110322)
ギヤ比19:1のギヤヘッド+20:60
加えている電圧:9.6V |
コース検出
センサ |
デジタル7個(キットのセンサ基板Ver.4) |
その他の
センサ |
エンコーダOME-360-2MCA、坂道センサとしてリミットスイッチを前後に2個使用 |
| 特徴 |
モータドライブ基板Type.Sを使用したことにより、車体がコンパクトに仕上がりました。またできるだけ重心が低くなるように意識して基板等のパーツを配置しました。後輪を1輪につき2つのモータで回して、加減速性能を上げています。坂検出を前後2カ所で検出することにより、坂の誤検出を無くしています。 |
| 苦労した点 |
モータドライブ基板Type.Sを組み上げるとき、部品が高価だったので絶対に失敗ができないという緊張感と、チップ抵抗やチップトランジスタなどの部品が細かく、ピンセットを使いながらの細かい作業が続いたのが苦労しました。また時間があるときはMCを使ってギヤボックスを製作しましたが、全国大会直前に試した1輪2モータのギヤボックスは自分でけがいてボール盤で穴を空けました。そのときのモータとタイヤのギヤの噛み合わせを微調整するのが苦労しました。 |
| 感想 |
全国大会優勝を目標に今まで様々なことを試しながら、少しでも速く安定したマシンを作るために頑張ってきたので、目標を達成できてとても嬉しいです。これからも研究を重ねて連覇を目指して頑張っていきたいです。 |
|
 |
 |
 |
 |
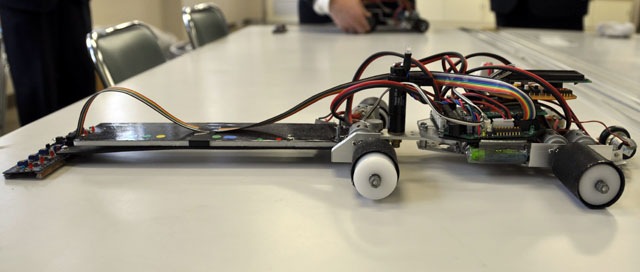
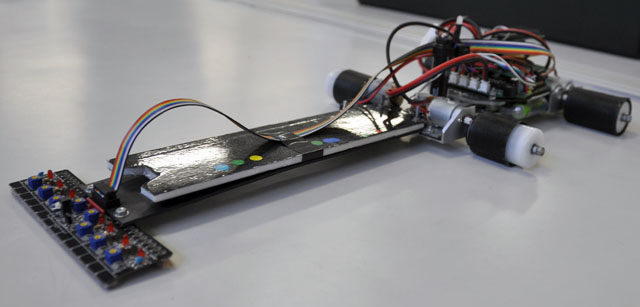
| 上から見たところ |
横から見たところ |
正面から見たところ |
※画像はクリックすると拡大表示します。
|
高校生 Advanced Classの部 3位
|
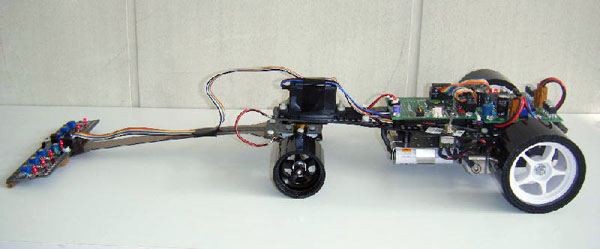
| 熊本県立御船高等学校 西村 一秀君 「Joker」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:550mm 全幅:245mm ホイールベース:167mm |
| 重量 |
1049g |
| 電池 |
8本 |
| 駆動モータ |
前輪:2個(前輪1つに1個のモーター) 後輪:4個(後輪1つに2個のモーター)
ギヤ比:60:8 |
| タイヤ、ホイール |
前、後輪タイヤ:直径;38mm 幅;55mm
フィルムケースを使用し、スポンジシートを貼り付けシリコンシートを巻いている。
前、後輪ホイール:直径;31mm 幅;55mm
フィルムケースを加工して製作した。 |
| サーボ |
マクソンモ−ター(RE16 118682) ギヤ比 19:1
90:24のギヤを入れて全体で71:1
加えている電圧:9.6V |
コース検出
センサ |
マイコンカーキットのセンサ基板Ver.4 |
その他の
センサ |
パソコンマウスを改造したロータリエンコーダ(使用フォトインタラプタ:1A51HR)1個、坂道センサ(フォトインタラプタ:1A51HR)1個 |
| 特徴 |
ホイールベースを短めにしてコーナリング性能を上げました。駆動系では、モータ数を前輪2個、後輪に4個にして加速とブレーキ性能をUPさせています。後輪モータの1個をフレームから上にずらして配置し、下に電池の1部を収納してフレームを短くしています。
坂道センサは、昨年から使っている方式で、センサアームの他に押さえ用の板を取り付け、坂道の頂上にラインセンサがきたときに2枚の板がずれることを検出して動作するようにしています。ロータリエンコーダは、パソコンのマウスを分解して取り出した部品を使って自作してます。 |
| 苦労した点 |
苦労した点は、ステアリングモータの取付に使うフランジを、旋盤を使って加工するときに、目盛を読み間違えて作り直しをしたところや、ギヤのかみ合わせが悪く大会2日前にギヤボックスを作り直したことです。前輪、フレーム、後輪の中心を正確に合わせることや、センサーアームの長さの決定、学校のコースで走らせた時に、コースアウトをして壁などにぶつかったときに破損した箇所の修理なども大変でした。プログラムでは、クランクへの進入速度やハンドルの角度、モータの最適なパワーを見つけるのに苦労しました。また、4輪独立制御のため各コーナーでのタイヤのそれぞれの回転数を調整したり、ホイールベースに合わせて内輪差外輪差を変えたりと細かい作業に苦労しました。 |
| 感想 |
初めての全国大会で大変緊張しました。また、会場の雰囲気は、県大会や九州大会とはまた違った緊張で埋め尽くされていてピリピリとした感じがありました。とにかく2年間集中して取組んできた結果が出て嬉しいです。全国大会から帰って早速次の大会へ向けての改良を始めました。大会では係の皆さんに大変お世話になりました。ありがとうございました。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
正面から見たところ |
※画像はクリックすると拡大表示します。
|
高校生 Advanced Classの部 ベストタイム賞
|
| 岐阜県立岐阜工業高等学校 所 洋一君 「テスター1056」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:700mm、全幅:225mm、ホイールベース:175mm |
| 重量 |
1000g |
| 電池 |
8本 |
| 駆動モータ |
6個、ギヤ比8:60
加えている電圧:電源電圧 |
| タイヤ、ホイール |
ジュラコンを旋盤で加工し、グリップスポンジをはめてある |
| サーボ |
マクソンモータRE16、ギヤ比60.8:1
加えている電圧:電源電圧 |
コース検出
センサ |
デジタル:5個
アナログ:2個 |
その他の
センサ |
エンコーダ、先読みセンサ、ゲート用センサ |
| 特徴 |
マシン性能にこだわり、無理のないプログラムで走行できるようにしました。 |
| 苦労した点 |
設計終了後に坂道の角度の変更が知らされたため、それに伴って再度設計を行ったこと。 |
| 感想 |
高校生最後の大会で、今年こそは優勝したかったのでとても残念です。ですが、この3年間で得たものはたくさんあり、貴重な経験をすることができました。これからは、この部活動での経験を忘れずに頑張っていきたいと思います。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
正面から見たところ |
※画像はクリックすると拡大表示します。
|
高校生 Basic Classの部 優勝
|
| 秋田県立男鹿工業高等学校 工藤 信二君「OgaTech SK」 |
| 内 容 |
詳 細 |
| 長さ関係 |
全長:465mm 全幅:185mm(後輪) 145mm(前輪) ホイールベース:182mm |
| 重量 |
約480g(電池除く) |
| 駆動方式 |
後輪駆動(ギア比11.6:1) |
| タイヤ、ホイール |
フロント:タミヤ製ホイール スポンジシート巻き 直径40mm
リア :タミヤ製ホイール スポンジシート巻き 直径64mm |
| サーボ |
サンワ SRM−102Z |
コース検出
センサ |
センサ基板Ver.4 |
| 特徴 |
リアタイヤは、直線でのスピードが出るように直径を大きくしました。加速をよくするため、車体に多くの穴をあけ軽量化しました。フロントは、サーボのトルクが小さいので後輪より小さい直径で、幅を後輪より狭くしました。また軽量化と加工を簡単にするためベアリングは使用していません。 |
製作で
苦労した点 |
ユニバーサルプレートを利用して加工したので、モーター等の取り付けの穴加工は簡単だったが、軽量化のために多くの穴を加工するのが大変でした。北東北地区大会後、走行中にひんぱんにリセットがかかり、その原因がわからず解決するまでに時間がかかりました。 |
プログラムで
苦労した点 |
全国大会は一発勝負なので、とにかく100%で走行してもコースアウトしないように、クランクでのブレーキの設定に苦労しました。 |
| 感想 |
決勝トーナメントに進むことが目標だったので、まさか優勝するとは思いませんでした。決勝で思い切ってスピードを上げて勝負をかけ、無事完走し優勝できたことは、たいへん嬉しかったです。高校卒業を前にいい思い出ができました。 |
|
|
 |
 |
 |
| 上から見たところ |
横から見たところ |
正面から見たところ |
※画像はクリックすると拡大表示します。
|